Позиционер электропневматический МТМ830

Позиционеры МТМ830 предназначены для управления пневматическими односторонними мембранными пружинными механизмами (МИМ) пропорционально входному электрическому сигналу и уменьшения рассогласования хода МИМ путем введения обратной связи по положению выходного звена.
Область применения
Позиционеры являются комплектующими изделиями соответствующих исполнительных механизмов и не имеют самостоятельного применения. Позиционеры совместно с МИМ применяются в системах автоматического управления технологическими процессами в различных отраслях народного хозяйства.
Конструкция
Позиционеры выполнены в виде одного блока. Позиционер выполнен в прямоугольном корпусе. Крышка позиционера съемная, крепится четырьмя винтами М4. Крышка снабжена двумя стеклянными окнами для визуального контроля входного и выходного давления воздуха по манометрам. Основание представляет собой алюминиевую плиту, которая является несущей и функциональной деталью позиционера. На основании позиционера расположены четыре отверстия М8 для крепления монтажного комплекта, и расположен вал для крепления на него рычага обратной связи.
Конструкция позиционеров обеспечивает их установку на любой тип МИМов с помощью монтажного комплекта.Подключение внешних электрических цепей осуществляется с помощью разъема.
С левой торцовой стороны основания расположены штуцеры для подключения линии питания и выходного пневматического сигнала. На верхней торцовой поверхности основания расположен дроссель расхода воздуха, поступающего в управляющую камеру исполнительного механизма. На нижней торцевой поверхности основания расположен электрический разъем. Под крышкой на основании установлены два клапана для набора и сброса давления воздуха, пневматический редуктор, два манометра, плата электрической схемы и датчик обратной связи
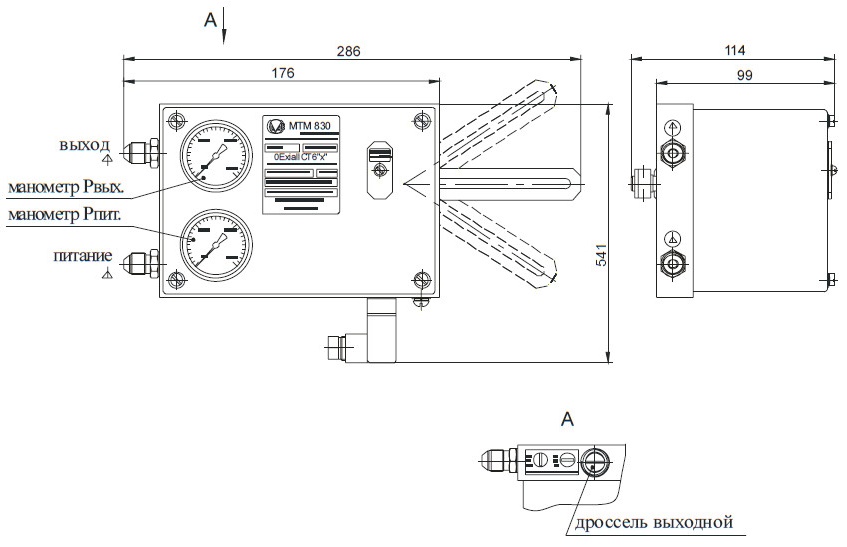
рис. 1 - Внешний вид позиционеров
Принцип работы
Принцип действия позиционеров основан на сравнении заданной и действительной величин позиции привода. При фиксации электронной схемой отклонения регулируемой величины она управляет пъезоклапанами, через которые происходит дозировка воздуха в камеры пневматического привода.
В соответствии с величиной и направлением рассогласования (заданной и действительной величины) электронная схема подает на соответствующий пъезоклапан электрическую управляющую команду. Пъезоклапан преобразует управляющую команду в пневматическое приращение управляющего воздействия.
При этом позиционер в зоне большого рассогласования (зона быстрого хода) подает непрерывный сигнал; в пределах зоны среднего рассогласования (зона медленного хода) он подает последовательности импульсов, а пределах зоны очень маленького рассогласования (настраиваемая мертвая зона) он не подает перестановочных импульсов.
Положение пневматического привода передается через следящий рычаг с нанесенной шкалой в миллиметрах. Штифт исполнительного механизма устанавливается в прорезь рычага напротив метки заданного хода механизма. Угловая погрешность при движении механизма устраняется с помощью пружины, установленной на рычаге обратной связи. Рычаг обратной связи ориентировано насаживается на вал бесконтактного датчика угла поворота.
Питание позиционера осуществляется по двухпроводной линии связи, которая соединяет разъем ХР через барьер искрозащиты (например, МТМ501-02 (МТМ501-04)).
На передней панели крышки позиционера находится планка, после поворота которой открывается доступ к резисторам “0” и “max”. Полярность при подключении разъема ХР не нормируется.
Входной сигнал, подаваемый через разъем XP, сравнивается в электронной схеме с сигналом бесконтактного датчика обратной связи, который механически связан с выходным звеном (штоком) МИМа. Если величина входного задаваемого токового сигнала не равна величине сигнала датчика обратной связи, электронная схема подает сигнал на наборный клапан. Максимальный пневматический сигнал подается на вход МИМа до тех пор, пока шток займет положение, при котором сигналы входной и обратной связи будут равны. При выполнении обратной команды уменьшения давления в МИМе, схема подает сигнал на сбросовый клапан до тех пор, пока сигналы входной и обратной связи будут равны.
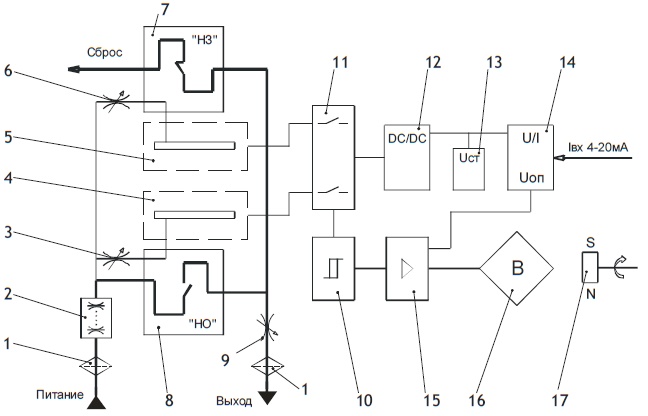
рис. 2 - Структурная схема позиционеров, где:
1 – фильтр пневматический, 2 – регулятор давления, 3 – переменный дроссель пневматического повторителя набора, 4 – клапан набора, 5 – клапан сброса, 6 – переменный дроссель пневматического повторителя сброса, 7 – пневматический повторитель сброса давления, 8 – пневматический повторитель набора давления, 9 – переменный дроссель на выходе, 10 – компаратор, 11 – электронные ключи управления клапанами набора и сброса, 12 – преобразователь напряжения, 13 – стабилизатор напряжения, 14 – источник опорного напряжения, 15 – усилитель, 16 – магнитный датчик, 17 – вал со встроенным магнитом
Основные функции
- взрывозащищенное исполнение с видом взрывозащиты "искробезопасная электрическая цепь", маркировка взрывозащиты "ОExiaIICТ6 X"
- двухпроводная схема включения
- входные сигналы 4...20 мА (Uмин= 9.6 В Rвх. = 480 Ом)
- полярность входного сигнала не нормируется
- условный ход штока МИМ 16...100 мм
|
Пневматическое питание |
140...600 КПа |
|
Расход воздуха питания в установившемся режиме, не более |
120 л/ч |
|
Расход воздуха выходного сигнала, не менее |
5 м3/ч |
|
Время отработки МИМ-300 при давлении питания 0.25 МПа, не более |
5 сек. |
|
Пределы допускаемой основной погрешности, приведенной к диапазону изменения выходного сигнала |
±1% |
|
480 Ом |
|
|
Диапазон рабочих температур |
0...+50 °С |
|
Степень защиты корпуса |
IP54 |
|
Масса, не более |
3 кг |
Обозначение при заказе
Пример заказа:
- МТМ830 (-30...+50 °С)
- МТМ830 (0...+50 °С)



